四轮足控制API说明
四轮足控制API
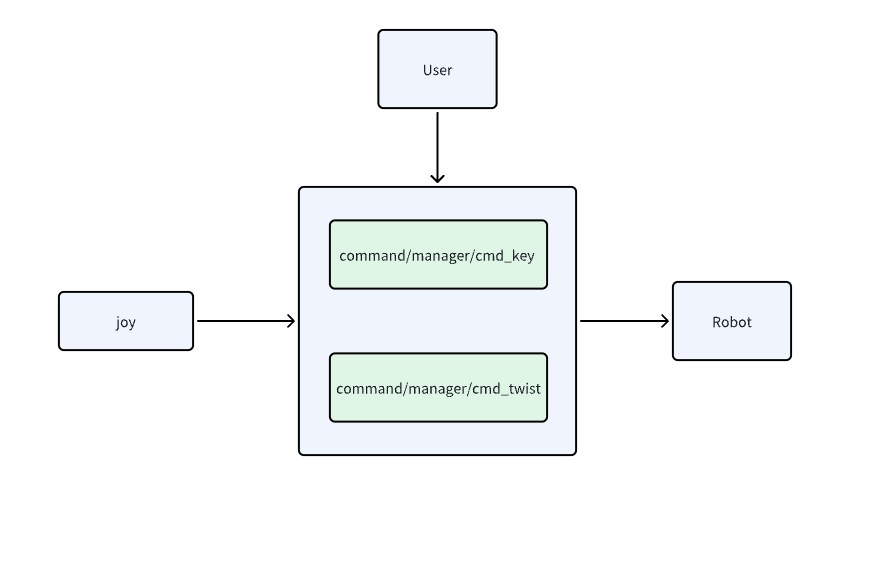
发布的 ROS2 Topic
ROS Topic |
Interface |
Description |
|---|---|---|
command/manager/cmd_key |
std_msgs::msg::String |
状态切换 |
command/manager/cmd_twist |
geometry_msgs::msg::Twist |
线速度、角速度控制 |
使用说明
在控制中,设置安全检测,订阅了线速度和角速度心跳检测,只需要发布一个0.0的线速度和角速度,才能进行状态切换。同时,如果遥控器在打开的情况下,不进行任何操作,一直会发布一个0.0的线速度和角速度,这时如果用户发布一个非0.0的线速度和角速度,则被遥控器控制消息覆盖,用户控制参数失效。只需要关闭遥控器,避免控制参数失效。
1 示例:
// 创建发布者
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr string_publisher_;
string_publisher_ = get_node()->create_publisher<std_msgs::msg::String>(
tita_topic::manager_key_command,
rclcpp::SensorDataQoS().reliable());
// 发布消息的代码
auto msg = std_msgs::msg::String();
msg.data = "idle"; // 或其他你想要发送的字符串
string_publisher_->publish(msg);
模式名称 |
描述 |
|---|---|
站立模式 |
“transform_up” |
趴下模式 |
“transform_down”或者”idle” |
爬行楼梯 |
“jump” |
平地模式 |
“balance_stand” |
2 示例:
// 创建发布者
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr cmd_vel_publisher_;
// 初始化
cmd_vel_publisher_ = get_node()->create_publisher<geometry_msgs::msg::Twist>(
tita_topic::manager_twist_command,
rclcpp::SensorDataQoS().reliable());
// 2. 创建并发布消息
auto twist_msg = std::make_shared<geometry_msgs::msg::Twist>();
twist_msg->linear.x = 1.0; // 设置线速度
twist_msg->linear.y = 0.0;
twist_msg->linear.z = 0.0;
twist_msg->angular.x = 0.0;
twist_msg->angular.y = 0.0;
twist_msg->angular.z = 0.5; // 设置角速度
cmd_vel_publisher_->publish(*twist_msg);
取值范围
线速度:-1.0 ~ 1.0
角速度:-1.0 ~ 1.0