遥控手柄配对指南
(在机器人上执行此操作)最新的机器人系统现在配备了内置的遥控配对软件,有两种快速配对遥控器的方法。
备注
对于较旧的系统版本,使用 sudo apt install crsf-app 安装遥控器配对软件
或者您也可以联系FAE获取遥控器配对软件的安装包。
方法一
使用
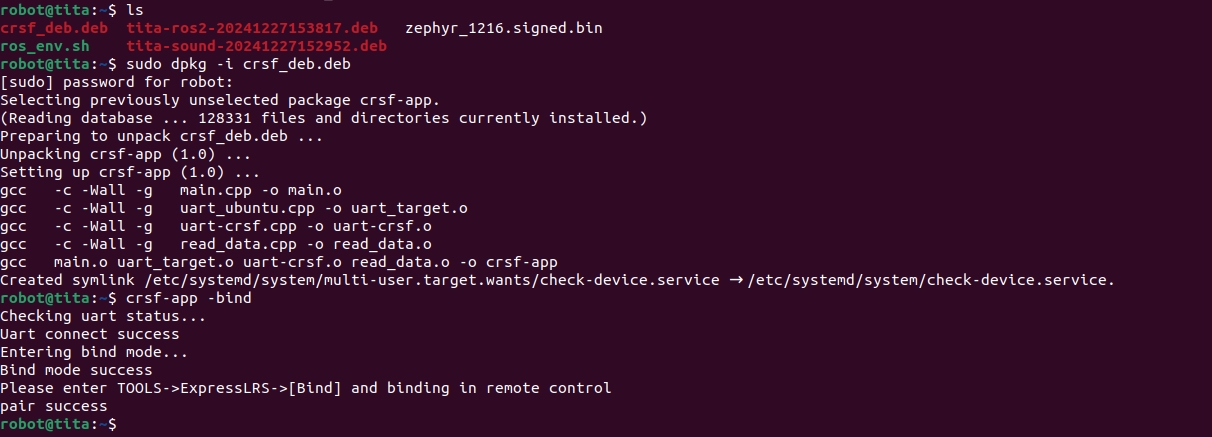
sudo dpkg -i crsf-app(如果已经包含或已安装,请跳过此步骤。)
备注
如果没有安装 crsf-app 可以通过以下指令
sudo apt-get install crsf-app.
执行指令
crsf-app -bind,可以观察到返回:
遥控器开机后 右边按键向左推进入界面后 按键依次进入Tools ->ExpressLRS-> bind模式,进行配对接收机.


配对完成返回pair success
方法二
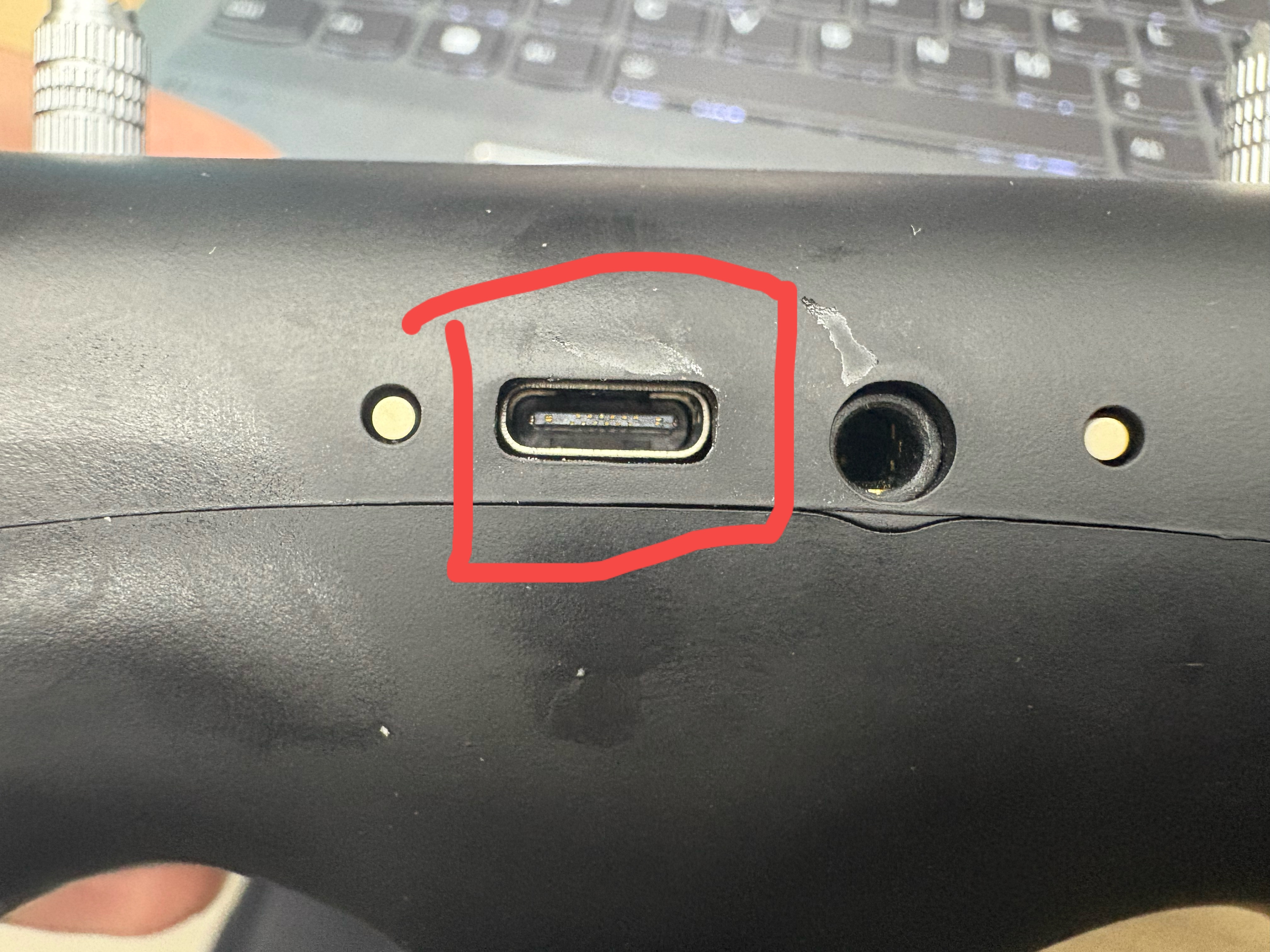
首先,您需要一根双头Type-C数据线,如下所示:

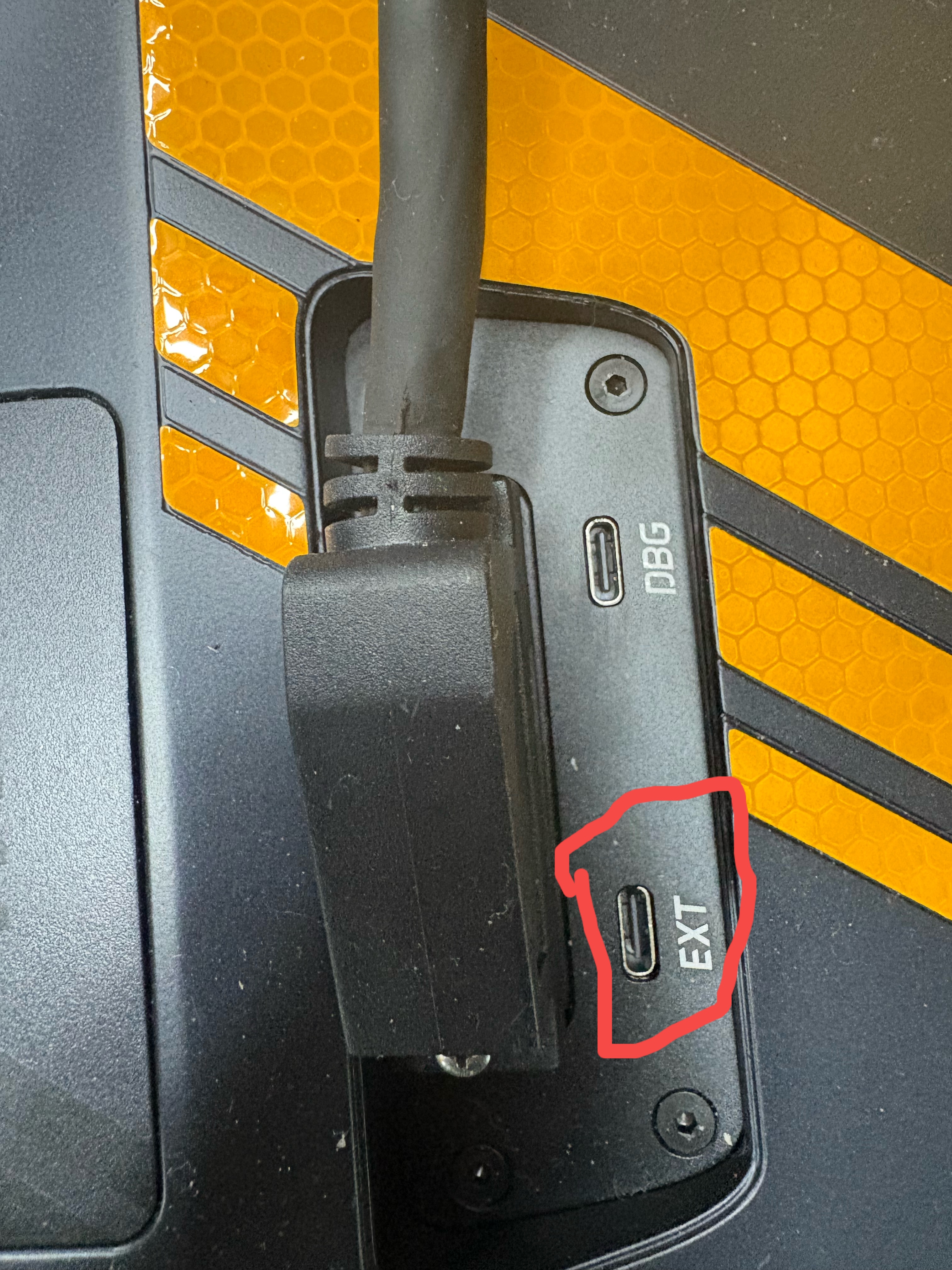
将数据线连接到机器人上的EXT端口和遥控器上的数据端口,如下所示:
备注
机器人和控制器必须处于开启状态。
遥控器和机器人连接后,遥控器会出现
Select mode的界面,并选择第三个选项USB Serial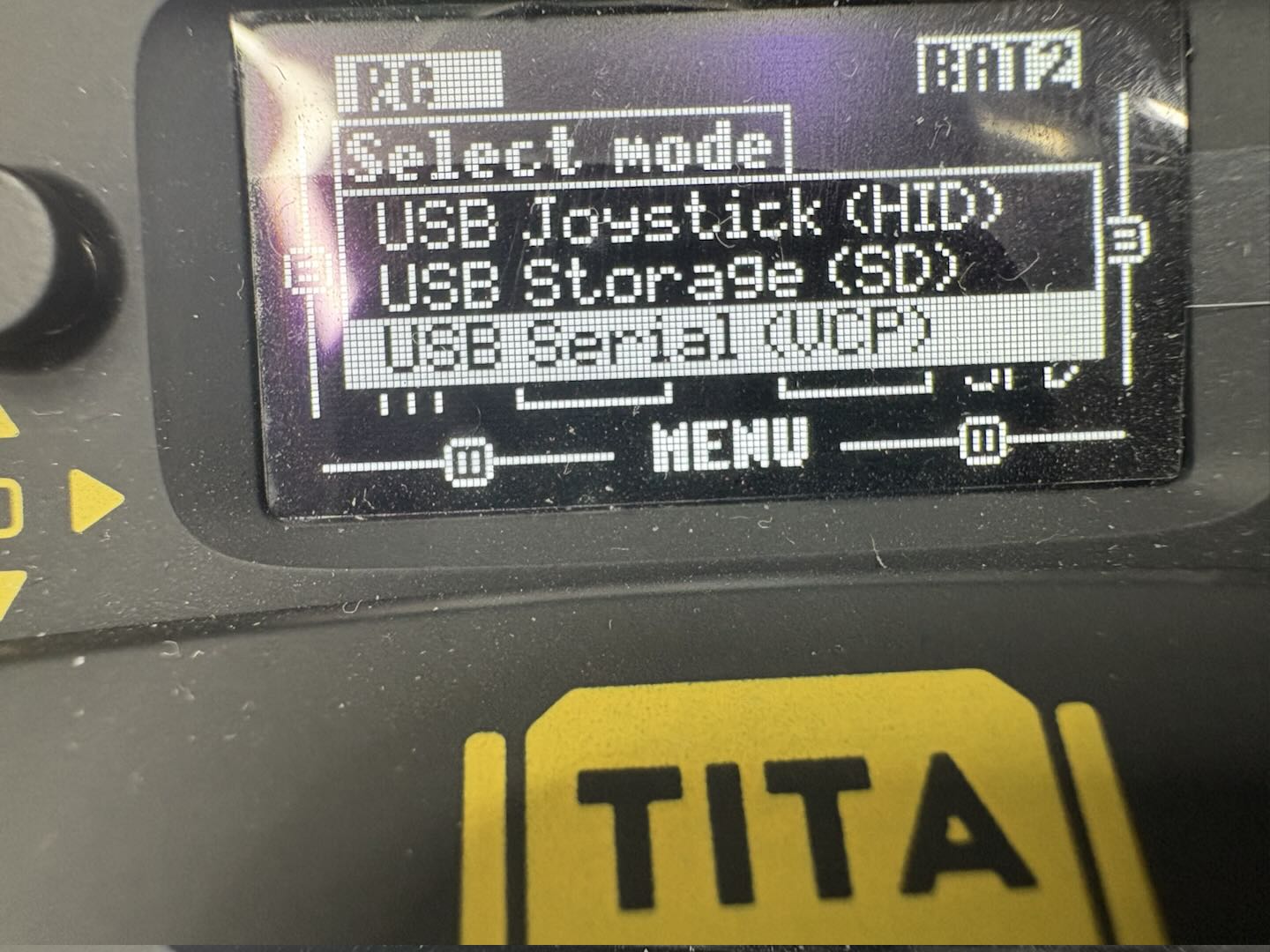
耐心等待配对。如果配对成功,机器人的电池信息将显示在遥控器界面的右上角。
